メディア
情報

2025 / 10 / 29
ラック&ピニオンを安定かつ安全に効率よく運用するためには、適切な選定と正確な計算が不可欠です。以下の5つのステップは、YYCエンジニアがラック&ピニオン駆動システムの選定および評価を行う際の基本的なプロセスを示しています。
ラック&ピニオンの組み合わせを選定する前に、用途の種類、動作方向、主な負荷条件を明確にします。これらの初期データは、その後の計算の基礎となります。
| 記号 | 説明 | 単位 / 備考 | 例 |
|---|---|---|---|
| Application | 用途タイプ | — | 工作機械の移動 |
| Movement | 水平 / 垂直 | — | 水平 |
| m | 最大負荷重量 | kg | 2500 |
| μ | 摩擦係数 | — | 0.01 |
| v | 最大直線速度 | m/min | 60 |
システム設計におけるトルクと回転速度の基準を定義するため、減速機およびモーターの定格仕様を入力します。
| 記号 | 説明 | 単位 | 例 |
|---|---|---|---|
| NG | 減速機定格回転速度 | rpm | 3000 |
| TG | 減速機定格トルク | Nm | 180 |
| i | 減速比 | — | 10 |
| NM | モーター定格回転速度 | rpm | 3000 |
| TM | モーター定格トルク | Nm | 20 |
運転条件に基づき運転係数 KA と安全係数 SB を設定します。さらに以下のように加速および減速パラメータを入力します。
| 記号 | 説明 | 単位 | 例 |
|---|---|---|---|
| KA | 運転負荷係数 | — | 1 |
| SB | 安全係数 | — | 1 |
| α₁ | 加速度 | m/s² | 2 |
| t₁ | 加速時間 | s | 0.5 |
| α₂ | 減速度 | m/s² | 2 |
| t₂ | 減速時間 | s | 0.5 |
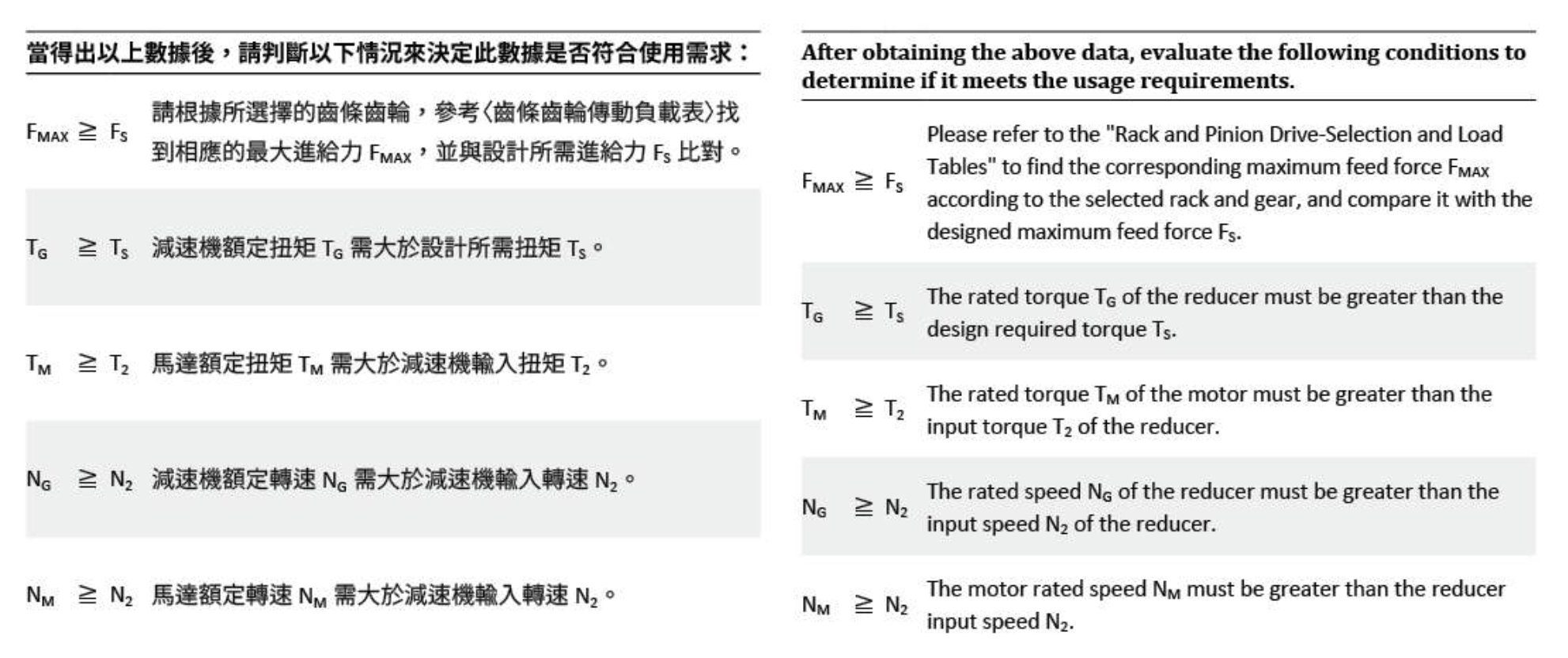
計算後、以下の条件を満たしていることを確認し、安全かつ適切な運転が可能であることを検証します。
本アプリケーションは要求条件を満たしています。
| 条件 | KA |
|---|---|
| 均一負荷 | 1.0 |
| 中負荷 | 1.25 |
| 重負荷 | 1.75 |